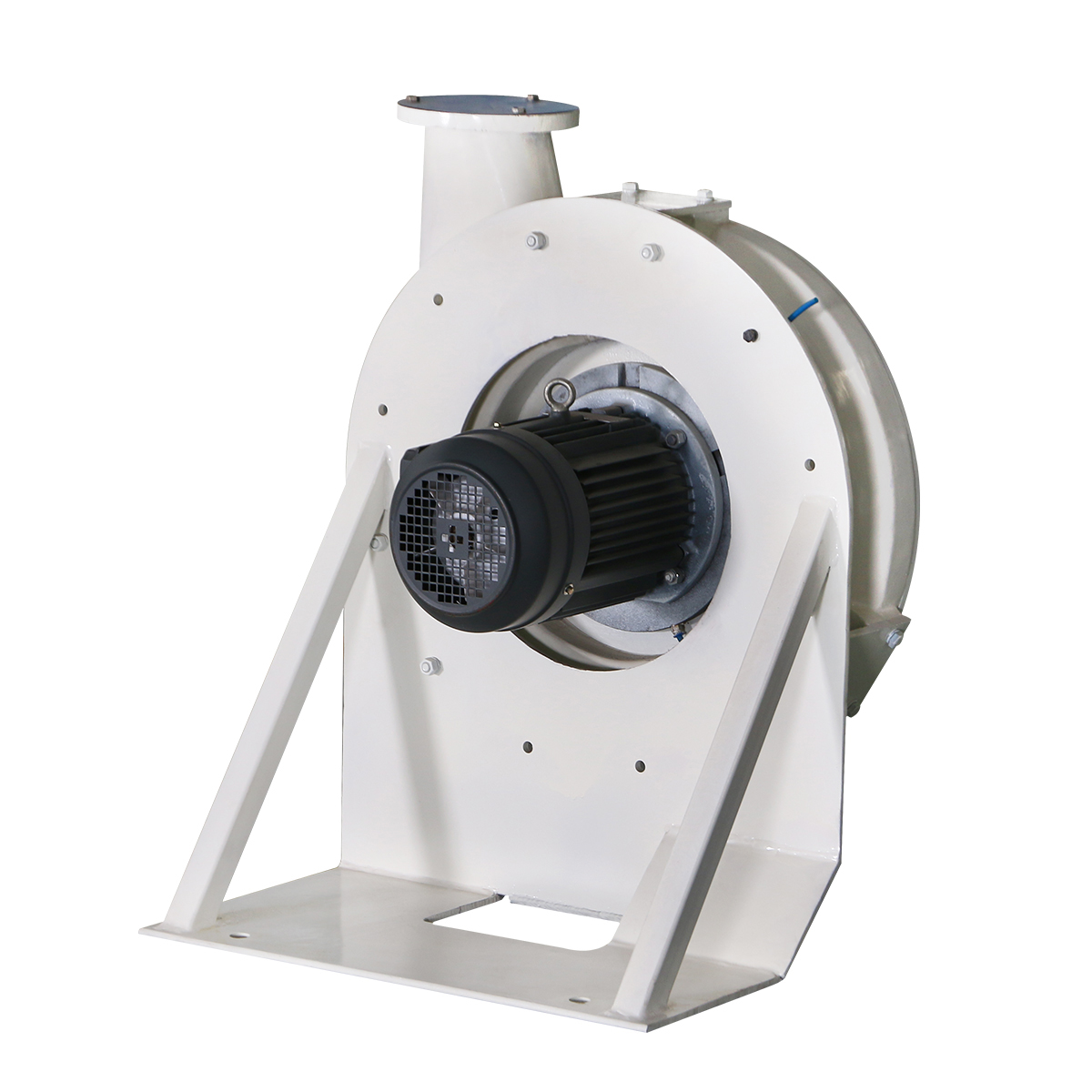
Bugdaý mekgejöwen pnewmatik rolik fabrigi

Galla üweýji maşyn
Rolik fabrigi mekgejöwen, bugdaý, durum bugdaýy, çowdary, arpa, garpyz, mekgejöwen we malt gaýtadan işlemek üçin iň oňat däne üweýji maşyn.Freze rolikiniň uzynlygy 500mm, 600mm, 800mm, 1000mm we 1250 mm-de bolýar.
Oňaýly işlemek üçin ikinji gatda ýa-da ýer tygşytlamak üçin birinji gatda gurnalyp bilner.Dürli ýerüsti parametrler dürli üweýiş geçelgesine we dürli aralyk materiallara laýyk gelýär.
Aýratynlyklary
1. Un degirmeni hökmünde MMQ görnüşli däne rolik fabrigi un üwemek pudagy üçin ajaýyp dizaýn edildi.
2. Freze rulonlary uglerod polat şöhlesine ýerleşdirilen we amortizatorlarda ýerleşýän SKF (Şwesiýa) rolikli podşipniklerde işleýär.Şeýlelik bilen, maşynyň titremesi ep-esli peselip, enjamyň işleýşi gaty ümsüm bolup biler.
3. Rolik fabriginiň esasy binýadynyň gurluşy agyr ýük göterijiligi üçin niýetlenen çoýundan ýasalýar.Beýleki çarçuwalar mehaniki stresleri ýok etmek üçin ýokary hilli polat plitalar bilen kebşirlenýär we degişli derejede işlenýär.Bu ýörite dizaýn, çäkli freze titremelerini we sessiz işlemegini kepillendirip biler.
4. Motor we çalt rolikleriň arasyndaky esasy hereketlendiriji mehanizm 5V ýokary dartyş guşagydyr, freze rulonlarynyň arasyndaky geçiriş bölegi titremäni we sesi uly derejede siňdirip bilýän kemerdir.
5. Rolikleriň degirmen rulonlary, enjamyň iki gapdalynda oturdylan pnewmatik SMC (Japanaponiýa) howa silindr enjamlary bilen meşgullanýar.
6. Freze rolik keseligine oturdyldy.Rolik toplumy ähli iş basyşyny göterýär.
7. Gorizontal rolik konfigurasiýasy we servo-iýmitlendiriji ajaýyp üweýiş işine goşant goşýar.
8. Rolik boşlugy üçin howa isleg dizaýny, üweýji rolikiň temperaturasyny peseltmäge kömek edýär.
9. Rolik merkezden gaçyryş demirden ýasalýar, uzak wagtlap dinamiki taýdan deňagramlaşdyrylýar.
Tehniki parametrleriň sanawy
| Görnüşi / parametri | Uzynlyk | Diametri | Agram | Şekiliň ululygy |
| mm | mm | kg | LxWxH (mm) | |
| MMQ80x25x2 | 800 | 250 | 2850 | 1610x1526x1955 |
| MMQ100x25x2 | 1000 | 250 | 3250 | 1810x1526x1955 |
| MMQ100x30x2 | 1000 | 300 | 3950 | 1810x1676x2005 |
| MMQ125x30x2 | 1250 | 300 | 4650 | 2060x1676x2005 |
Haryt maglumatlary

Material derejesi dereje datçigi bilen dolandyrylýar.
Duýgur akym gözegçiligi we iýmit rolikiniň takyk iýmitleniş reaksiýasy, üweýji rolikleriň hyzmat möhletini uzaltmak üçin peýdaly bolan üweýji rolikleriň ýygy-ýygydan gatnaşmagyndan we kesilmeginden gaça durýar.
Rolik: Iki gezek metaldan merkezden gaçyryş guýma, ýokary güýç we oňat aşaga garşylyk.Dinamiki deňagramlylygyň deňagramsyzlygy ≤ 2g.Jemi radial gutarýar<0,008 mm.Miliň ujy 40Cr bilen işlenýär we gatylygy HB248-286.Rolik üstüniň gatylygy: moumşak rolik Hs62-68, diş rolik Hs72-78.Mundan başga-da, gatylygyň paýlanyşy birmeňzeş, rolikiň gatylyk tapawudy ≤ Hs4.

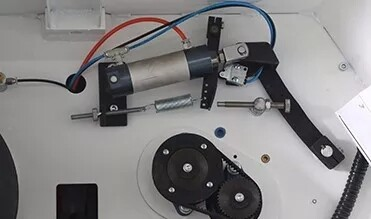
Iýmitlendiriji rolik: Iýmitlendiriji rolik, reaksiýasy duýgur silindr bilen dolandyrylýar.
Garalama bejergisi, kemer tigirine we posdan goraýan beýleki guýmalara ulanylýar.Ansat sökmek.

Biz hakda